![]()







Selected Articles from the
September 2001 Odyssey
Editor: Terry Hancock
- Robotics Aboard Space Station Alhpa, Steven Bartlett
- "Never Give Up!", Robert Gounley
- The Surf Report, Diane Rhodes
Robotics Aboard Space Station Alpha
by Steven Bartlett
Robotics plays a key role in the operations of Space Station Alpha. Without it, the complex assembly operations of the Station would be nearly impossible, key functions could not be performed and crews would waste valuable working time with maintenance activities. Robotics work in orbit involves a careful coordination and application of human and machine capabilities to carry out even the most routine of tasks quickly and safely.
Robotic systems are used to assemble hardware on orbit, monitor the health and condition of various equipment, perform maintenance and servicing functions, support experiments, and allow the routine resupply of the Station. In general, robots are used when human capabilities are inadequate for the task, when conditions are considered unsafe for human crews, or when using human crews is substantially more expensive than employing a robot. Considering that one hour of EVA time costs over $100,000 and one hour of robotic time costs less than $20,000, the Alpha partners have a strong financial motive to use robots wherever possible.
 |
| Artist's rendering of Mobil Base System. NASA |
The largest robotic element aboard Alpha will be the Mobile Servicing Center. It will consist of four key components: a Mobile Transporter, a Mobile Base System, the Space Station Remote Manipulator System, and the Special Purpose Dexterous Manipulator.
The Mobile Transporter is a trolley-like device used to move equipment back and forth along the Station's truss structure. It will secure the Mobile Servicing Center at a work site, transfer power to the rest of the Mobile Servicing Center, and send data back and forth between the Mobile Servicing Center and the pressurized portion of the Station. The Mobile Transporter is built by the United States.
The Mobile Base System will be mounted atop the Mobile Transporter and will serve as a base for attaching the other Mobile Servicing Center components as well as large elements being transported along the truss. The Mobile Base System is built by the Canadian Space Agency.
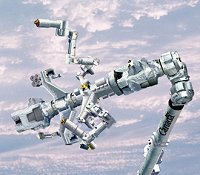
 |
| Artist's conception of Canadarm 2. NASA |
The Space Station Remote Manipulator System, also known as Canadarm 2, is a large, multi-jointed arm used to pick up and move around Station elements, EVA crewmen, and the Special Purpose Dexterous Manipulator. This arm, also developed by the Canadian Space Agency, is a larger, more capable version of the Shuttle Remote Manipulator arm which has been in use for nearly twenty years. The Station Remote Manipulator System is now on-orbit and was used to help install the new Airlock on the Station. This arm has special effectors and cameras on either end which allow it to move end over end around the Station from one attachment point or grapple fixture to the next. It provides coarse control and positioning of hardware on the facility.
The Special Purpose Dexterous Manipulator will attach to the end of the Station Remote Manipulator System. It will serve as the "fingers" of the Mobile Servicing Center, providing fine control and positioning of hardware and allowing many of the same capabilities as an EVA crewman. This Canadian-built component will be used for routine maintenance operations and some assembly activities in lieu of sending a crewman outside.
Besides the Mobile Servicing System, the Alpha Station will feature robotic arms built and attached to Japanese and Russian elements. The Japanese-built arm, or JRMS, will be attached to the outside of the Japanese Experiment Module. It will be used to service payloads exposed to the space environment. The Russian-built arm will primarily support assembly and maintenance or Russian-provided Station components. It will be used to maneuver and reposition large elements, including the Russian Solar Power Module.
 |
| Artist's rendering of the Special Purpose Dexterous Manipulator. NASA |
Robotics also supports routine Station resupply activities. The Russian Space Agency now provides Progress resupply craft with autonomous rendezvous and docking capability. These supply craft are derived from the venerable Soyuz space capsules and have been in use for nearly twenty years. The Progress ferries dock to the Russian-built Service Module. They can operate autonomously or be operated by Station or ground crews. The European Space Agency is developing a similar capability to support the rest of the Station systems.
Most robotic systems on Alpha are controlled and monitored by onboard crews using workstations located inside the pressurized modules. These workstations receive and process video signals from cameras around the Station and on the robots themselves. The crews also receive health and status information from the robots and the hardware on which they're working.
The crews can monitor hardware positions, joint locations, speeds and directions of motion, forces being applied, loads on joint motors, and some limited hardware contact information. From training and sophisticated software, crew members operating robotic systems can synthesize these data to deduce what the robots are doing, why, and how. A key requirement for performing safe robotics work in space is situational awareness: the crew has to know what is and will be near the robot at all times so that they can avoid potentially catastrophic collisions. The Station will have sophisticated simulators to allow the crew to safely rehearse robotic activities before actually carrying them out.
Current robotic systems require a great deal of human involvement in the control and decision-making processes. As robotic hardware and software improve, routine maintenance and monitoring activities will require less and less direct human involvement. This will free up more of the crew's time and allow them to focus more of their attention on performing experiments and improving the Station's operation.
File translated from TEX by TTH, version
2.25.
On 20 Jan 2002, 16:32.
Copyright © 1998-2003 Organization for the Advancement of Space Industrialization and Settlement. All Rights Reserved.